🤖Google lança novo modelo de robótica via API
O Google lançou o Gemini Robotics ER 1.6, um modelo de robótica que se destaca em raciocínio visual e espacial. O diferencial: está disponível pela API do Gemini, o que significa que qualquer desenvolvedor pode integrar capacidades de robótica nos seus projetos. --- Entre o robô modular da Northwestern e o modelo de robótica do Google, a semana deixou claro que robótica está entrando numa fase de aceleração. Não é mais só vídeo de demo no Twitter - são ferramentas e pesquisas que qualquer um pode usar.
Introducing Gemini Robotics ER 1.6, our new SOTA robotics model 🤖 which excels at visual and spacial reasoning, now available via the Gemini API! https://t.co/orAoslp4Zu
— @OfficialLoganK View on X
O Google disponibilizou via API o **Gemini Robotics ER 1.6**, modelo de robótica com capacidades avançadas de raciocínio visual e espacial. O anúncio representa a transição da robótica de demonstrações acadêmicas para ferramentas integráveis em ambientes de produção, permitindo que desenvolvedores adicionem funcionalidades autônomas a aplicações sem investimento em hardware robótico proprietário.
Do hardware para a API
Tradicionalmente, integrar capacidades robóticas exigia infraestrutura física complexa: sensores LiDAR, braços mecânicos e computação de borda dedicada. O Gemini Robotics ER 1.6 opera como modelo *software-defined*, processando entradas visuais e dados espaciais via chamadas de API. Isso significa que um desenvolvedor pode implementar algoritmos de navegação autônoma, reconhecimento de objetos em 3D e planejamento de trajetórias diretamente em aplicações web ou mobile, utilizando Python ou JavaScript no stack já familiar.
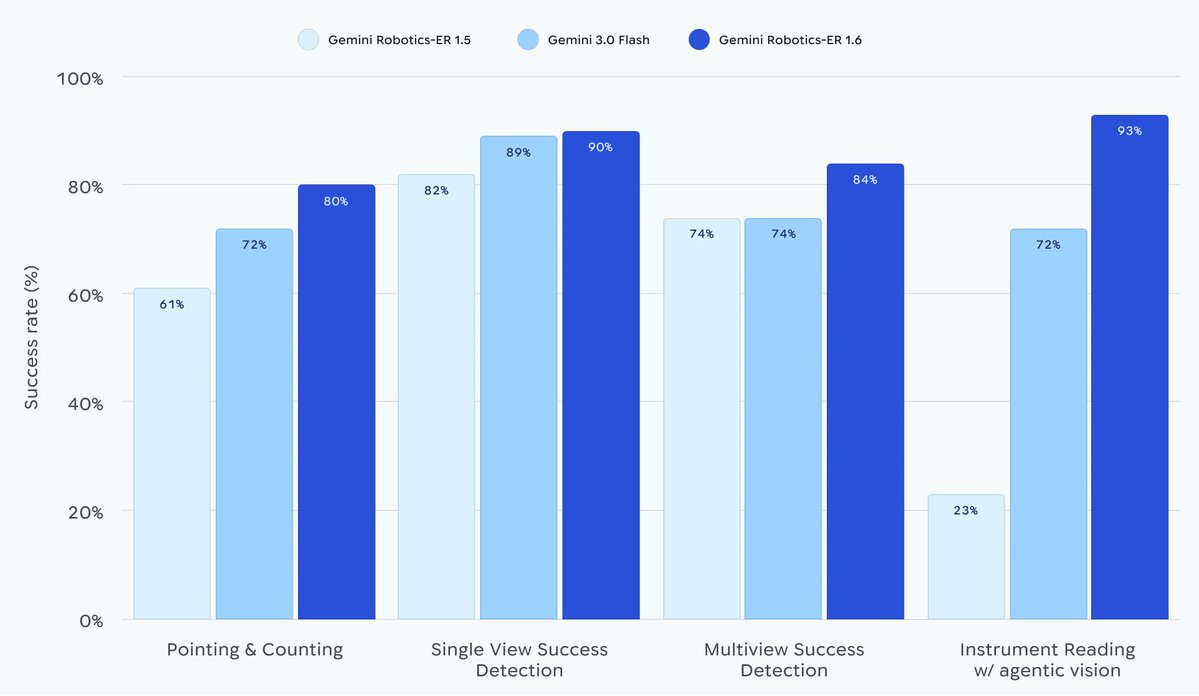
O modelo é classificado como SOTA (state of the art) especificamente por unificar **computer vision** e **spatial reasoning** em uma arquitetura multimodal. Enquanto sistemas anteriores processavam essas informações em pipelines separados, o ER 1.6 integra ambas as capacidades, reduzindo latência e melhorando a precisão em tarefas como manipulação de objetos em espaços dinâmicos ou mapeamento de ambientes não estruturados.
Contexto de aceleração do setor
O lançamento ocorre na mesma semana de avanços em robótica modular, como o sistema desenvolvido na Northwestern University. A coincidência temporal indica uma convergência: a robótica deixa de ser domínio exclusivo de laboratórios de pesquisa e grandes corporações de